My Projects
A showcase of my development, work, and major technical achievements
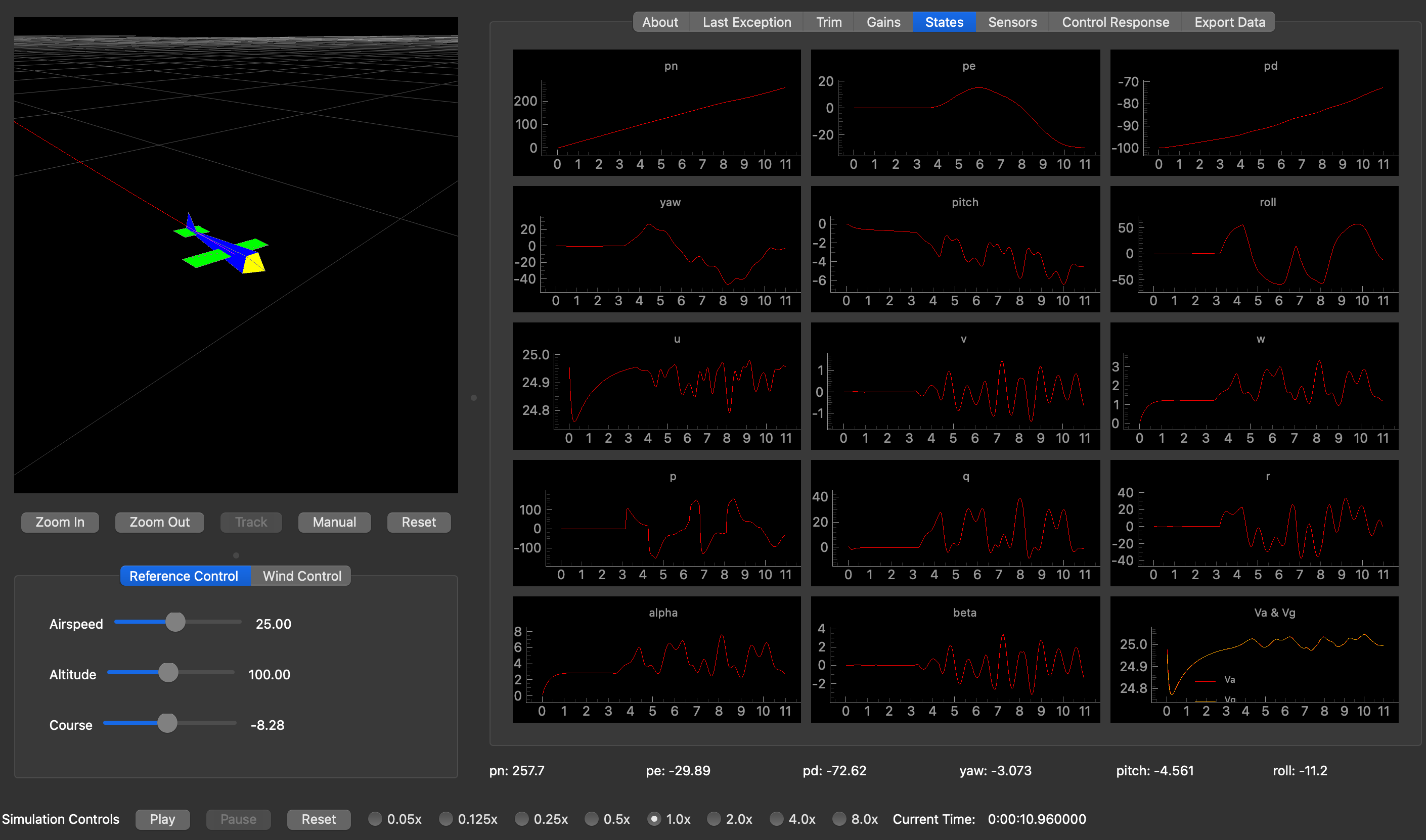
Small-Scale UAV with a Recurrent Neural Network
Developed an LSTM-based neural autopilot for a fixed-wing UAV using behavioral cloning from a classical PID controller, improving path tracking and altitude regulation in simulation.
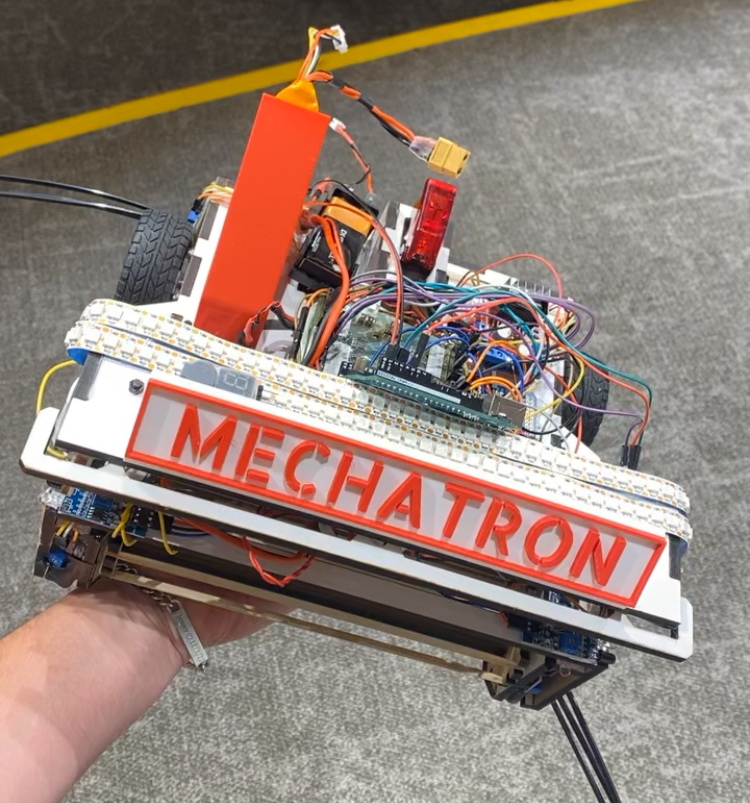
Mechatronics Robot Competition
Directed team integration of embedded state machine design with custom electrical circuits and analog filters. Built and tested robot under 5-week deadline, competing against 20 teams.

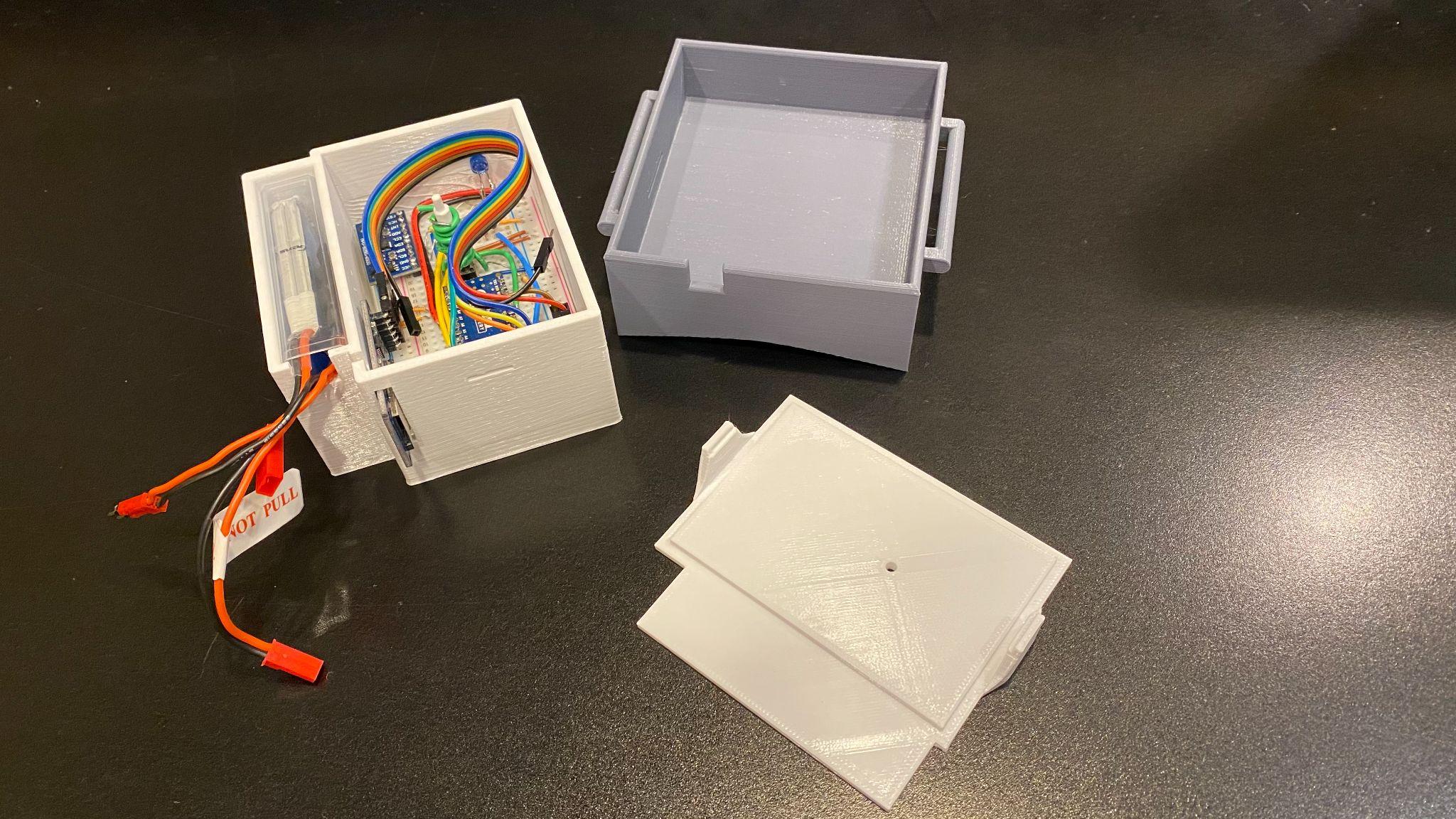
Capstone: Wet-Dry Cycler (RNA Replicator)
Project Director for Origins of Life Simulation Device. Designed automated device to simulate prebiotic wet-dry cycling, aiding RNA/DNA polymerization research with applications in siRNA production.
PvNet Canine Gait Analysis Sensor
Built a wearable Arduino- and IMU-based sensing device to capture canine gait data for early abnormality detection, downstream ML analysis, and veterinary visualization workflows.
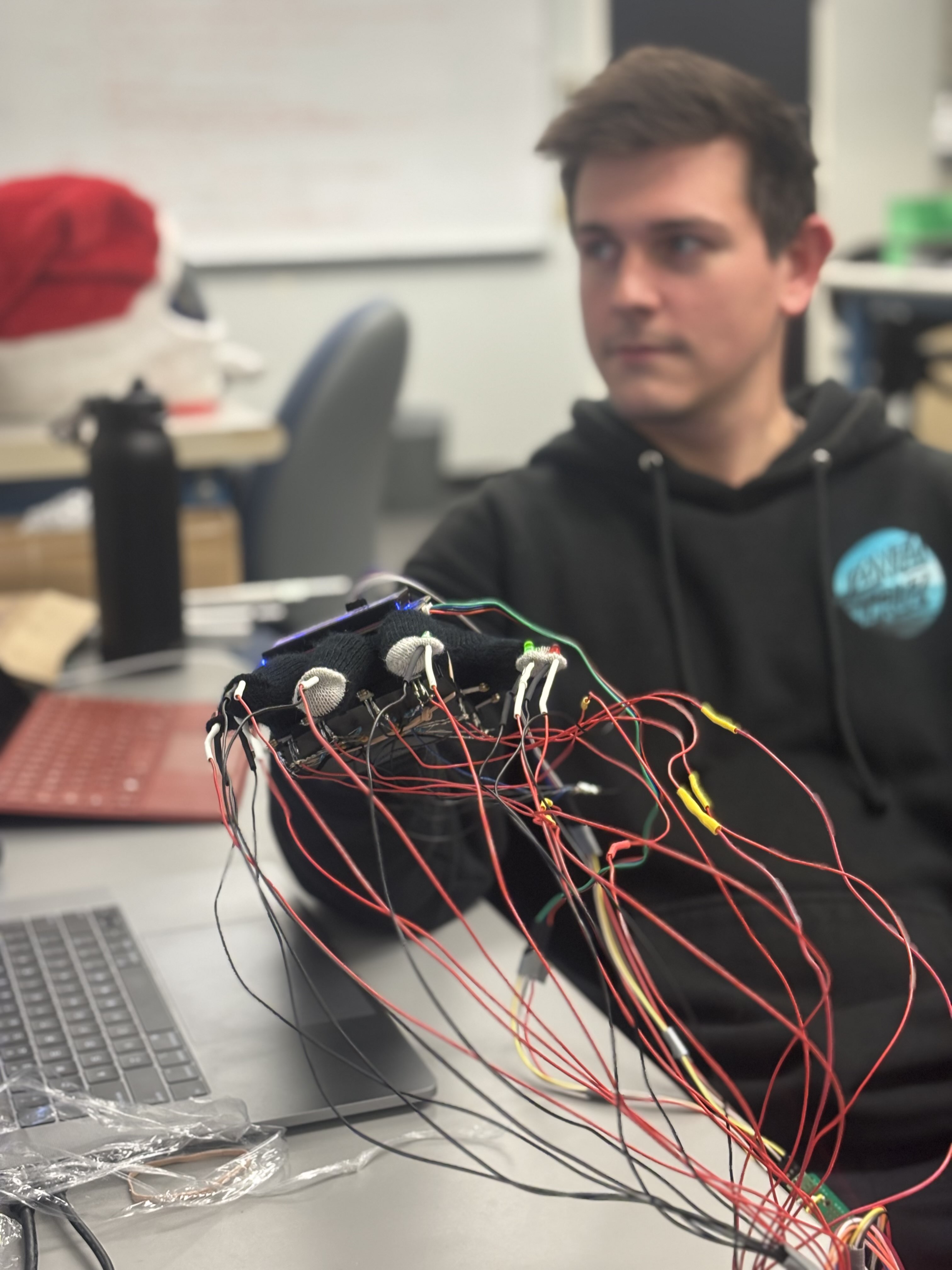
Professor Piano - Wearable Piano Teaching Glove
Designed a wearable piano teaching glove with piezoelectric sensors, real-time peak detection, IMU integration, and I2S audio an immersive learning experience.
Academic Coursework & Specializations
Advanced coursework in Robotics, Electrical Engineering, and System Design
Robotics Engineering Systems
Advanced Robotics Concentration
Comprehensive study of robotics systems including statics, dynamics, and kinematic motion of robots. Advanced feedback control systems and autonomous system design with practical implementation experience.
VLSI & Microcontroller Design
Electrical Engineering Specialization
Microcontroller system design with emphasis on embedded systems, real-time processing, Verilog integration, and hardware-software integration.
Circuit Theory & Analysis
Electrical Engineering Core • Advanced
Kirchhoff's Laws, voltage and current division, op-amps, RL and RLC circuits, frequency response, filters, Bode plots, Thevenin/Norton equivalence, and PSpice circuit modeling.
Feedback Control Systems
Robotics Engineering Core • Advanced
Advanced control theory with applications to robotics systems. System stability analysis, PID control, state-space methods, and real-time control implementation.
Data Structures & Algorithms
Computer Science Foundation • Completed
Trees, Heaps, Binary Search Trees, Graphs, BFS, and DFS. Algorithm analysis and optimization with applications to robotics and embedded systems.
Physics & Mathematics
Associate Degrees • M.E.S.A. Program
Advanced mathematics and physics foundation including calculus, differential equations, linear algebra, and physics principles essential for engineering applications.