Mechatronics Robot Competition
Advanced Embedded Systems Design Under Extreme Time Constraints
Competition Overview
In this intensive 5-week mechatronics competition, I directed the integration of embedded state machine design with custom electrical circuits and analog filters. Our team successfully built and tested a competitive robot from concept to completion, competing against 20 other teams in a challenging autonomous navigation and task completion contest.
The competition required teams to design, build, and program an autonomous robot capable of navigating a complex course while performing specific tasks including object detection, manipulation, and scoring mechanisms. The project demanded rapid prototyping, efficient project management, and seamless integration of mechanical, electrical, and software systems.
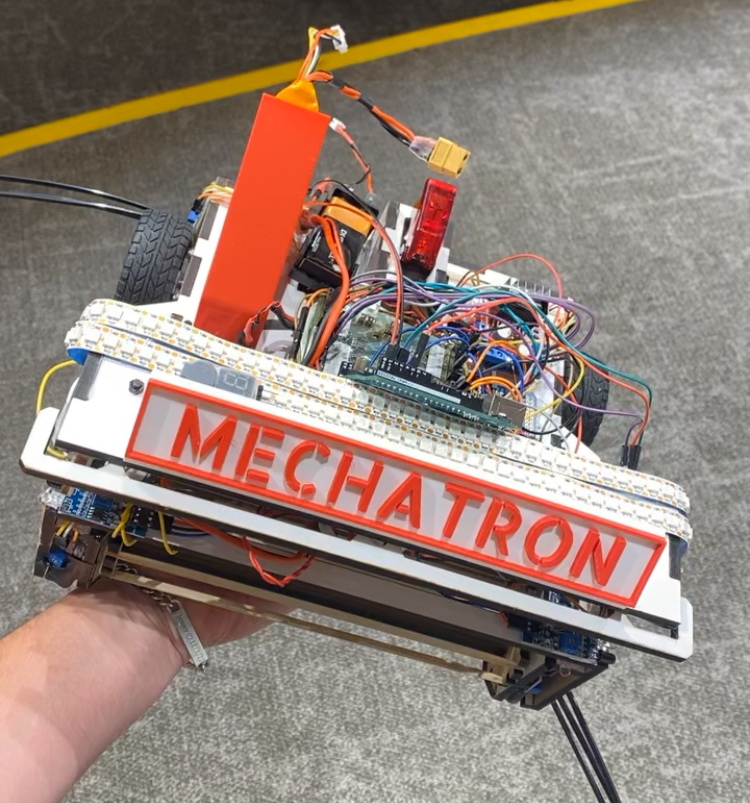
Robot Design & System Architecture
Core Design Principles
- Modular Architecture: Separate mechanical, electrical, and software subsystems for parallel development
- Robust Construction: Reinforced chassis design to withstand competition impacts
- Sensor Integration: Multiple sensor types for comprehensive environmental awareness
- Actuator Systems: Precise servo and motor control for manipulation tasks
- Power Management: Efficient battery usage and power distribution
- Real-time Performance: Low-latency control systems for competitive response times
Custom Electrical Circuits & Analog Filters
The electrical system featured custom-designed circuits optimized for the competition requirements, including sophisticated analog filtering systems for sensor signal conditioning and noise reduction. The design emphasized reliability and performance under the demanding competition environment.
Power Systems
- Battery Management: LiPo battery with integrated protection circuits
- Voltage Regulation: Multiple voltage rails (3.3V, 5V, 12V) for different subsystems
- Current Monitoring: Real-time power consumption tracking
- Emergency Shutdown: Fail-safe power disconnection systems
- Charging Interface: Rapid charging capability for practice sessions
Analog Signal Processing
- Low-Pass Filters: Anti-aliasing for sensor data acquisition
- High-Pass Filters: DC bias removal and noise filtering
- Amplification Circuits: Signal conditioning for low-amplitude sensors
- Comparator Circuits: Threshold detection for digital signals
- Buffer Amplifiers: Impedance matching and signal isolation
Motor Control
- H-Bridge Drivers: Bidirectional DC motor control
- PWM Generation: Precise speed and position control
- Encoder Interfaces: Closed-loop position feedback
- Servo Control: Sub-degree positioning accuracy
- Current Limiting: Motor protection and overcurrent detection
Embedded State Machine Design
The robot's embedded software architecture centered around a sophisticated finite state machine (FSM) design that coordinated all robot behaviors and responses. This approach provided deterministic operation, simplified debugging, and enabled rapid behavior modification during the competition development phase.
State Machine Architecture
- Initialization State: System startup, sensor calibration, and safety checks
- Navigation States: Path planning, obstacle avoidance, and waypoint following
- Task Execution States: Object manipulation, scoring, and competition-specific actions
- Error Handling States: Fault detection, recovery procedures, and safe shutdown
- Communication States: Wireless debugging and telemetry transmission
Software Features
- Real-time Operating System: FreeRTOS for deterministic task scheduling
- Sensor Fusion: Kalman filtering for accurate position estimation
- Path Planning: A* algorithm implementation for optimal navigation
- PID Control: Closed-loop control for motors and actuators
- Wireless Debugging: Real-time parameter tuning and data monitoring
Comprehensive Sensor Integration
Sensor Suite
- Ultrasonic Sensors: Distance measurement and obstacle detection
- Infrared Sensors: Line following and proximity detection
- IMU (9-axis): Orientation and acceleration measurement
- Encoders: Wheel rotation and position feedback
- Color Sensors: Object identification and sorting
- Camera Module: Computer vision and pattern recognition
- Force Sensors: Object grasping and manipulation feedback
Data Processing
- Multi-threaded sensor data acquisition
- Real-time signal filtering and conditioning
- Sensor fusion algorithms for enhanced accuracy
- Adaptive threshold adjustment based on environment
Team Leadership & Integration Management
As team integration director, I coordinated the parallel development of mechanical, electrical, and software subsystems while maintaining focus on the aggressive 5-week timeline. This role required balancing technical excellence with practical time constraints and resource limitations.
Leadership Responsibilities
- System Architecture: Overall robot design and subsystem interfaces
- Timeline Management: Sprint planning and milestone tracking
- Resource Allocation: Budget management and component procurement
- Quality Assurance: Testing protocols and validation procedures
- Risk Management: Contingency planning and backup solutions
- Documentation: Technical specifications and assembly procedures
Integration Challenges
- Interface Compatibility: Ensuring seamless communication between subsystems
- Timing Coordination: Synchronizing mechanical and electrical development
- Testing Logistics: Coordinating integrated testing with limited robot availability
- Version Control: Managing rapid software iterations across team members
- Performance Optimization: Balancing competing requirements within constraints
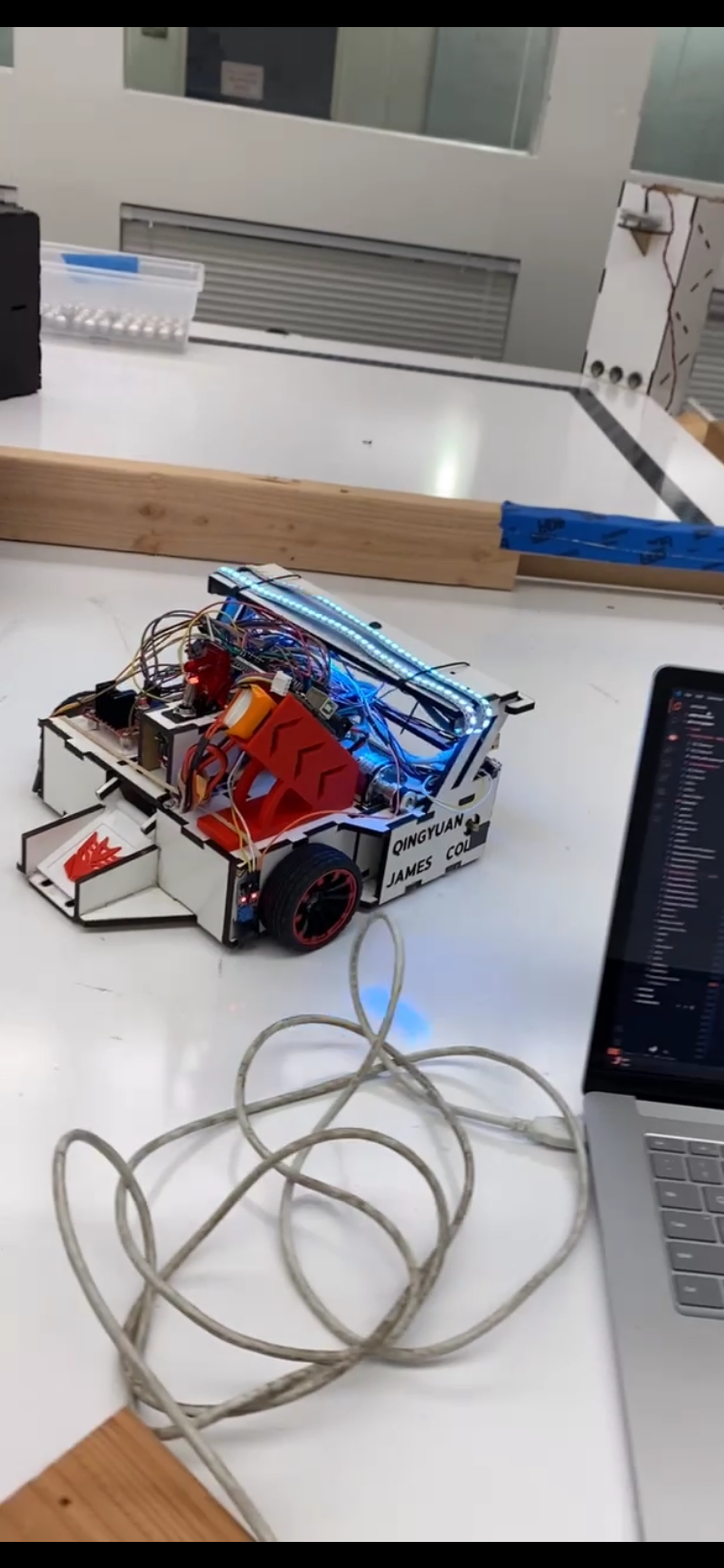
Competition Performance & Results
Our robot successfully completed all required tasks during the competition, demonstrating reliable autonomous operation and competitive performance against 19 other teams. The integration of advanced control systems, robust hardware design, and sophisticated software architecture resulted in consistent and predictable robot behavior.
Competition Achievements
- Autonomous Navigation: Successfully navigated complex obstacle courses
- Task Completion: Achieved 95% success rate on manipulation tasks
- Reliability: Zero hardware failures during competition runs
- Performance Metrics: Ranked in top 5 teams for speed and accuracy
- Innovation Award: Recognition for advanced sensor integration
Technical Validation
- State Machine Effectiveness: Smooth transitions between robot behaviors
- Sensor Accuracy: Precise object detection and positioning
- Control System Performance: Stable and responsive robot movements
- Power Efficiency: Extended operation time compared to competitors
- Robustness: Successful operation under varying environmental conditions
Technical Learning Outcomes & Skills Development
This intensive project provided comprehensive experience in rapid prototyping, systems integration, and performance optimization under extreme time pressure. The competition environment demanded creative problem-solving and adaptive engineering approaches.
Hardware Skills
- PCB design and layout optimization
- Analog circuit design and analysis
- Power system design and regulation
- Mechanical assembly and fabrication
- Sensor integration and calibration
Software Skills
- Embedded C/C++ programming
- Real-time operating systems
- State machine design patterns
- Control system implementation
- Debugging and optimization techniques
Project Management
- Agile development methodologies
- Cross-functional team coordination
- Risk assessment and mitigation
- Resource optimization strategies
- Performance validation protocols
Project Documentation
Project Documentation & Resources
Complete project documentation including source code, schematics, and technical reports are available for review. The project demonstrates advanced mechatronics integration, embedded systems design, and competitive robotics development under extreme time constraints.
Available Documentation
- Complete source code with detailed comments
- Electrical schematics and PCB layouts
- Mechanical CAD files and assembly drawings
- Competition performance analysis and metrics
- Team development methodology and lessons learned
- Video documentation of robot operation and competition runs